Overview
This project addresses the challenge of reliable UAV navigation during transitions between outdoor and indoor environments, where GNSS signals are weak or unavailable. We developed a multirotor UAV system that combines GNSS/INS (using an Error-State Kalman Filter) with monocular Visual-Inertial Odometry (VIO) to enable continuous, uninterrupted navigation.
Key contributions:
- A nonlinear flight control system for multirotor UAVs
- GNSS/INS navigation with an Error-State Kalman Filter
- VIO integration for GNSS-denied environments
- A working prototype demonstrating real-time navigation switching
This work highlights a robust system integration approach for environment-adaptive navigation, allowing UAVs to operate seamlessly across GNSS-available and GNSS-denied settings.
Gallery
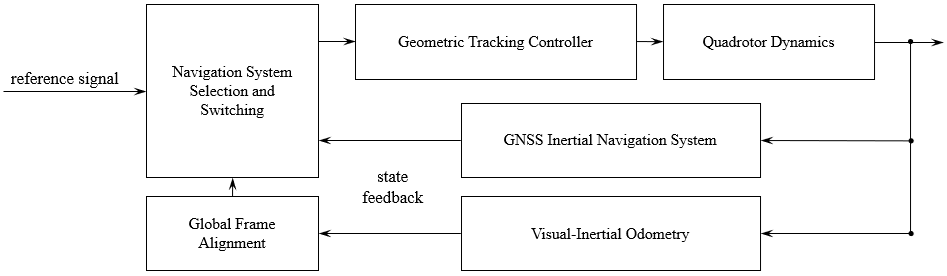
Control System Diagram
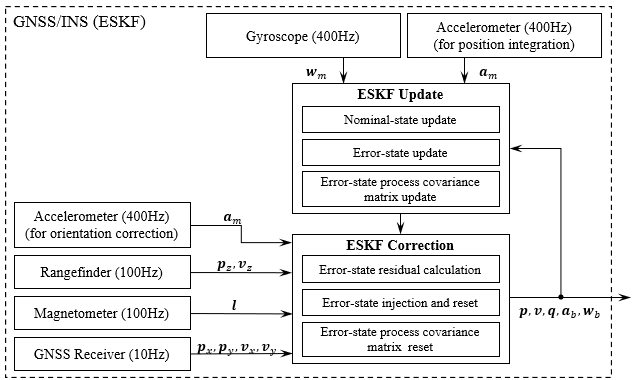
Error-state Kalman Filter
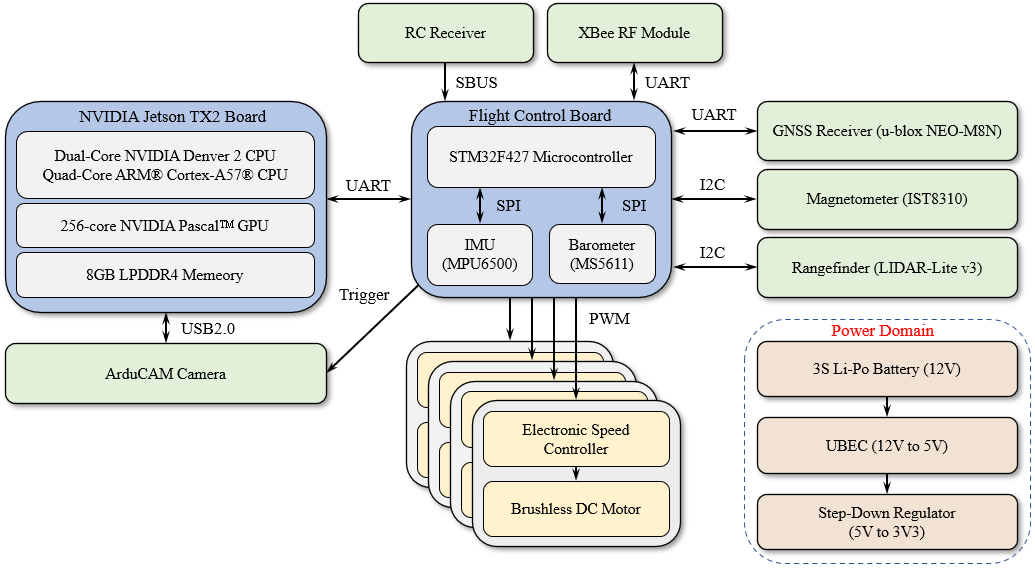
Hardware Architecture
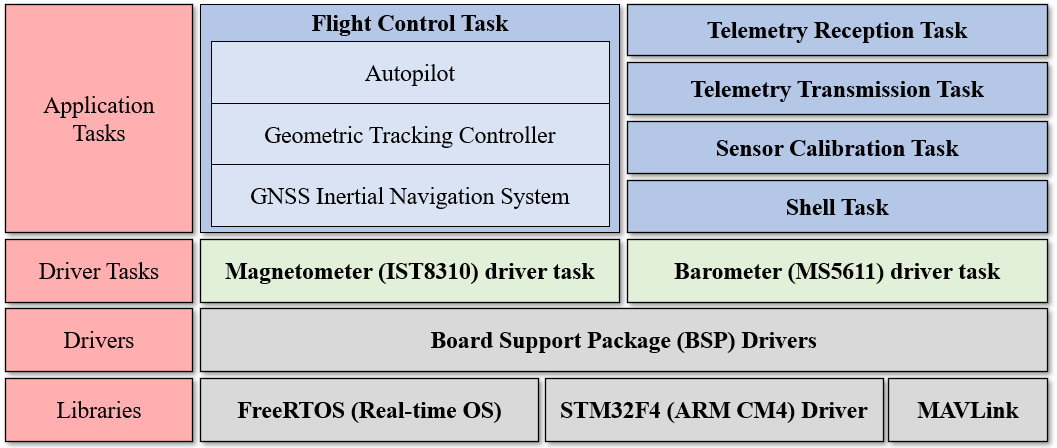
Software Architecture